
GNSS草の根基準局、再開から約2ヶ月。わけあって。湯来大森八幡神社境内で試験観測。

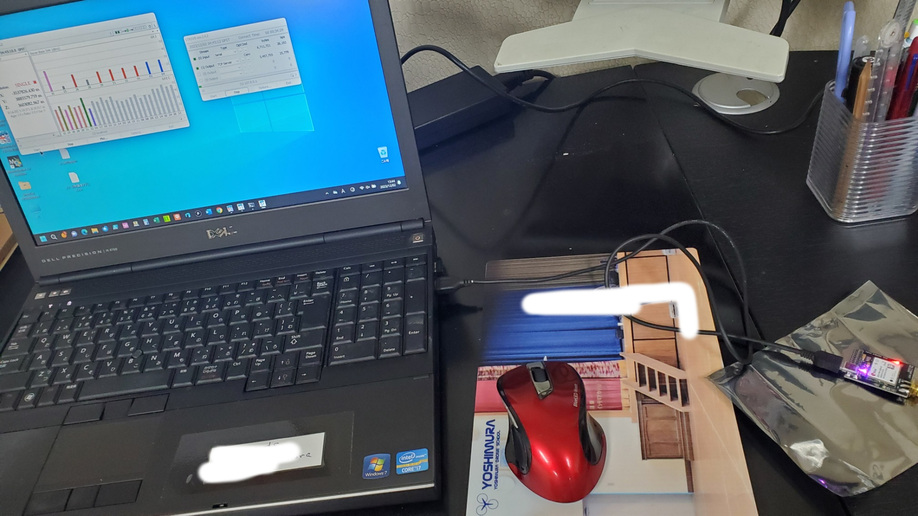
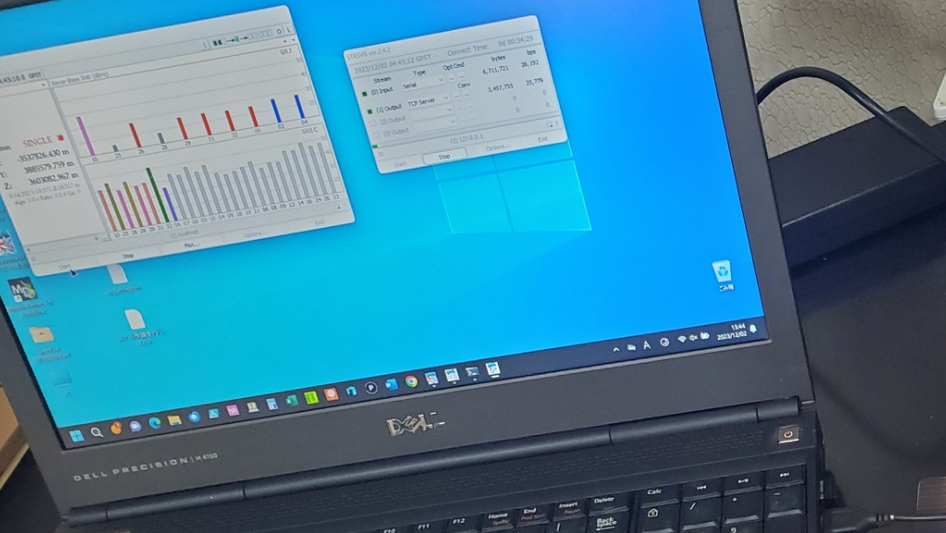
この日は強風で、かつパソコンの操作も必要(STRSVRでの観測データの分配(?))なのでかなりの重装備。テーブルの上にはパソコン(バッテリーを交換して外出用として稼働時間が稼げるものだが中身は古い世代のCPU)アンテナはトラ技系のもの。ネットはスマホのテザリング。
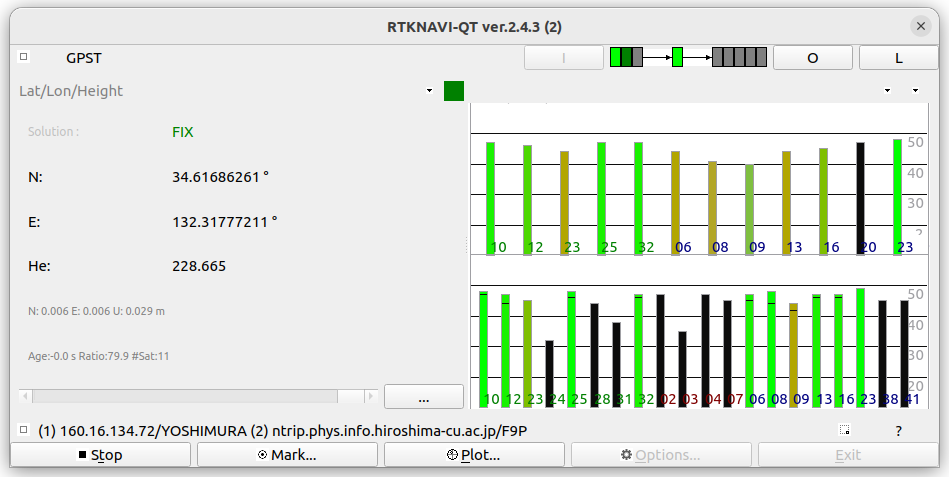
とりあえず、基準局YOSHIMURAとでRTKを試みる。コールドスタートなのですぐにはFIXにはならないが2分ほどでFIXしてくれた。YOSHIMURAからは18kmくらいはあるが比較的あっさりとFIXして拍子抜け。もう少し時間がかかるか、あるいはできないと思っていたが。
YOSHIMURAからはQZSSのRTCM3はまだ出せていない、RoverはU-BloxでGPS,QZSS,BeiDou.
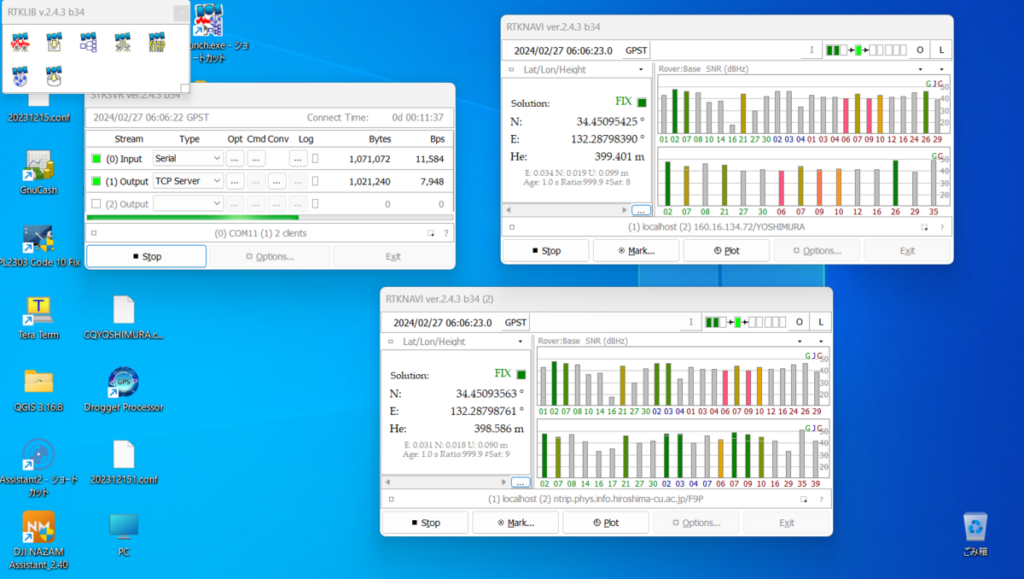
安定してFIXが続いていたので、一旦止めてSTRSVRで受信信号をLocalhostのPortへ送る
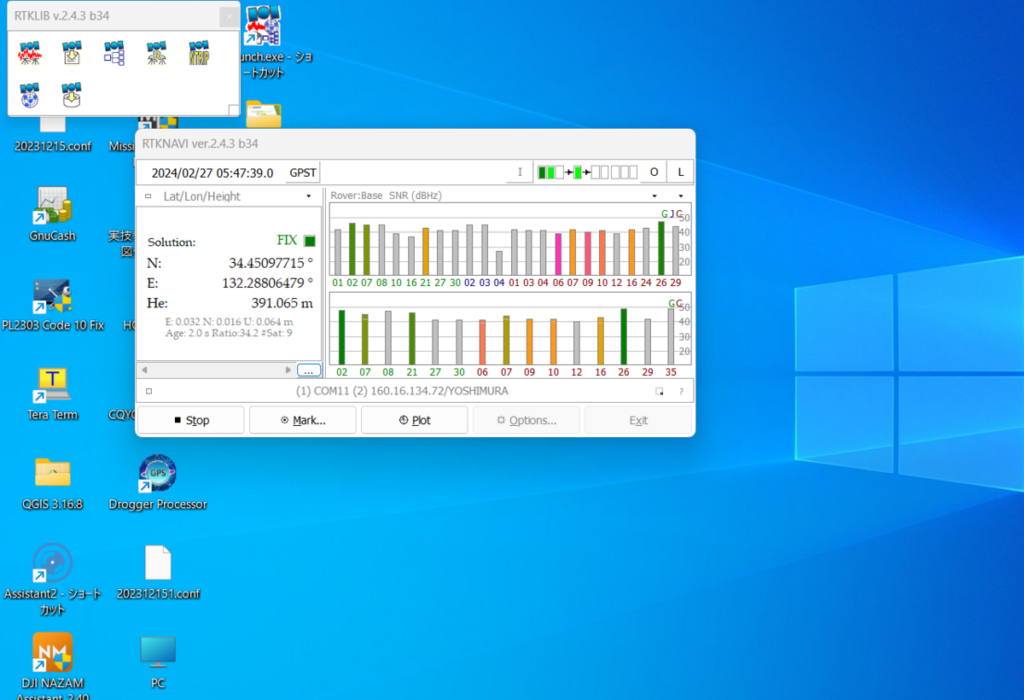
そのU-Blox信号を2つのRTKNAVIへ送ってみた。

片方が基準局−広島市立大学(HCU) もう片方がYOSHIMURA。 対 YOSHIMURAではFIXまでが対HCUよりは時間がかかった。(HCUとの距離(12km)とYOSHIMURAとの距離(18km)HCUの座標値は現在のHCUのアーカイブから算出したものと現在の発表値とではかなりの違いがあることを確認済みなので数字の違いはあまり問題とは考えていない。
そこで、これに気を良くしてもう1セット持ってきたポールのラズパイRTKで境内を歩いてみた。基準局はYOSHIMURA.(中身をYOSHIMURAに固定して設定してある)
FIXまでには数分の時間がかかったがそれでも比較的早めにFIXしてくれた。

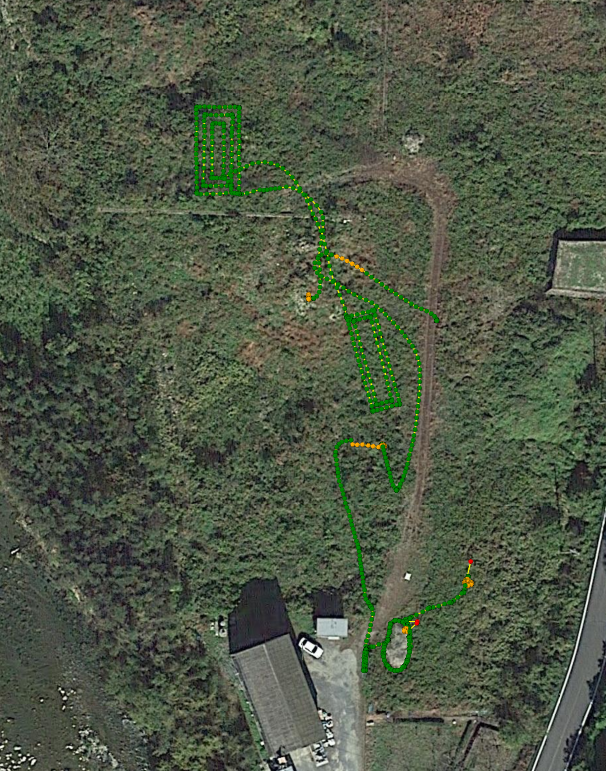
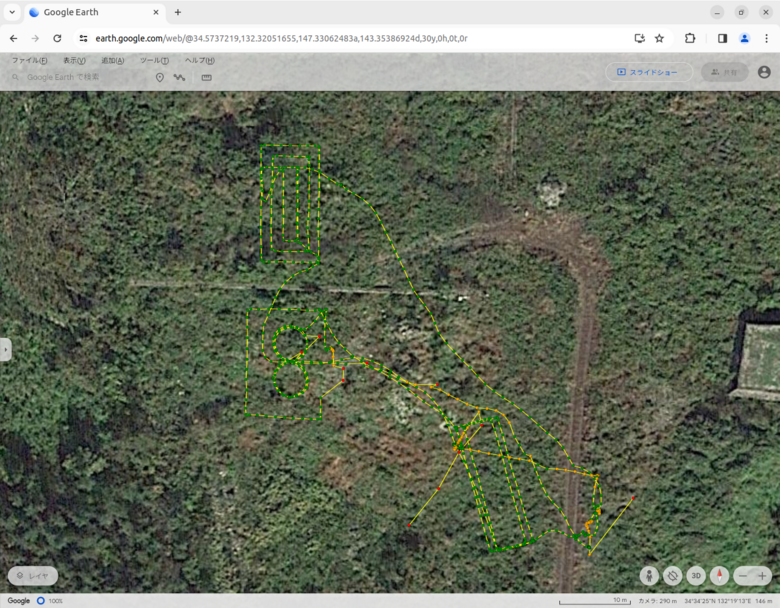
その観測データをKmlファイルに直してGoogleEarthで表示させた。
18km離れたYOSHIMURAとのRTKとしては十分な位置精度と思えるが。(GoogleEarthのほうが正確とは限らないし。) 参道は素直に描けている。
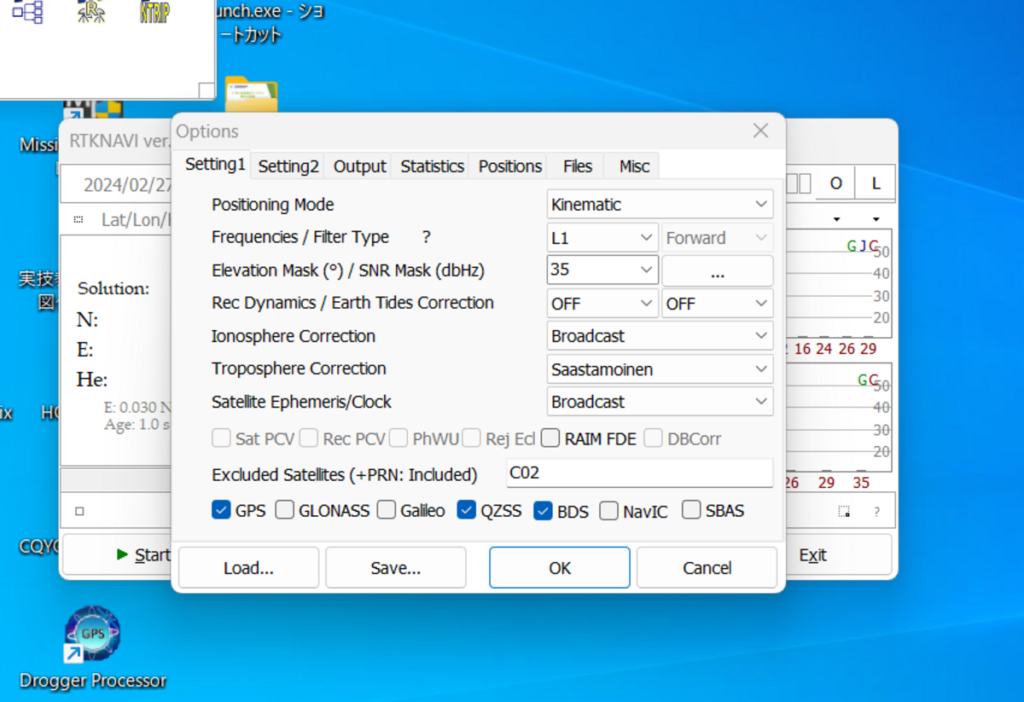
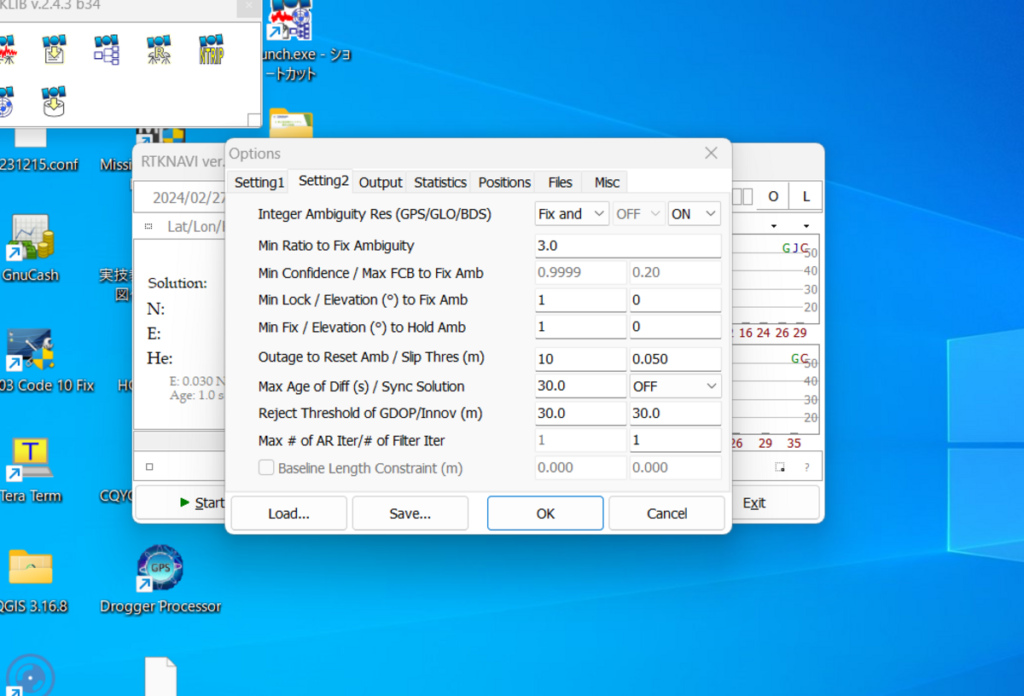
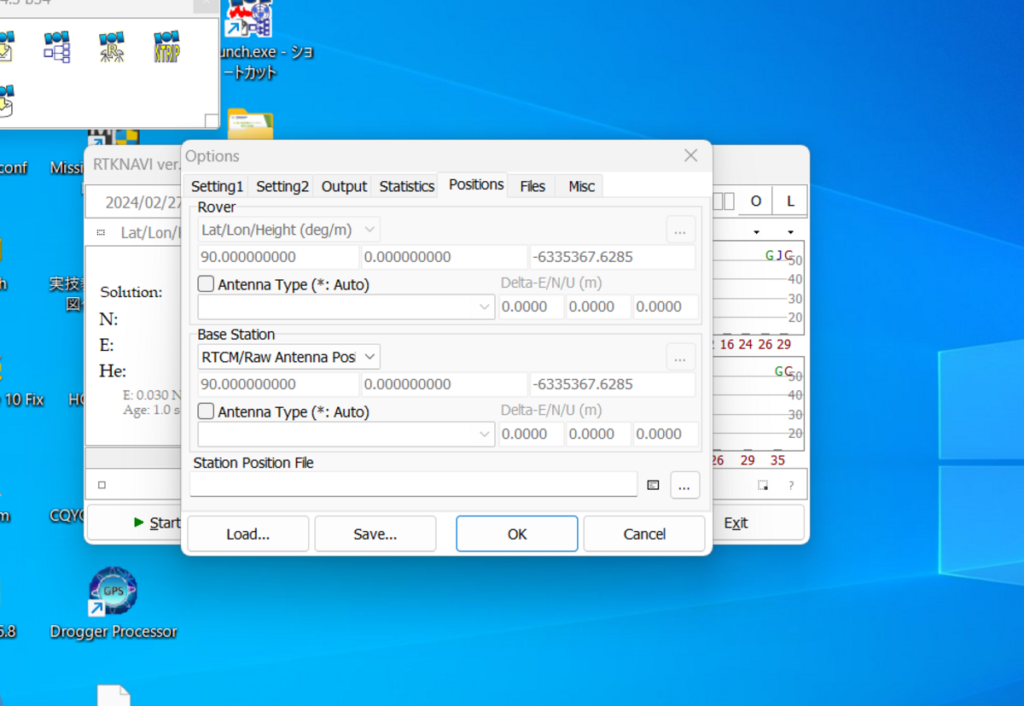
備忘録としてこの日のRTKNAVIの設定を残しておく。
(前職のときにはここで多くの石材工事をさせてもらった、その後、神社総代の交代で弊社の入札金額よりもわずかに少ない金額を提示する業者が仕事を請け負うようになったが。)
(一の鳥居 二の鳥居 参道 灯籠 玉垣 〆柱移設工事などは有限会社吉村石材店の仕事、まさかRTKの観測のためにここに来るとは。そのときには全く思いも付かないこと。不思議な縁かも)(?)
久しぶりに湯来大森八幡様に手を合わせてきました、なにかの御縁に感謝です。